1 设计任务概述
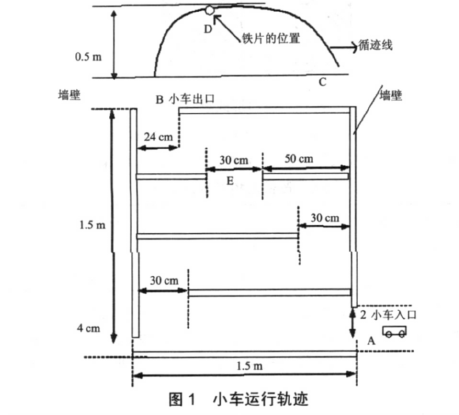
设计制作一个智能小车,该小车能按照要求自动运行,从建筑物中曲折的道路通过,并完成规定的动作。设矩形建筑物有2 个门A、B,门宽24 cm,建筑物是高10 cm、厚2 cm 的矮墙,建筑物内无引导轨迹,如图1 所示。
任务1:
(1) 要求智能小车从A 门进入并开始自动计时,从B 门出来,在行进过程中,能自动选择适当的路径,避开墙壁,找到通路,3 min 之内到达B 门;
(2)到达B 门,停5 s,小车自动计时并声光报警。
任务2:
(1)自B 门外,循弧形引导轨迹BC 前进(引导轨迹为2cm宽);
(2)途中检测到铁片D(铁片D 放置在轨迹BC 前1/2 段上的任意位置)时停车3 s,并声光报警;
(3)要求小车拾起铁片D,继续沿引导轨迹前进;
(4)到达C 点,在C 点处,放下铁片D 并停止前进,声光显示控制结束,并停止计时,分别显示BD、DC 段所用的时间,铁片为直径2 cm 的圆形薄片。
2 系统方案
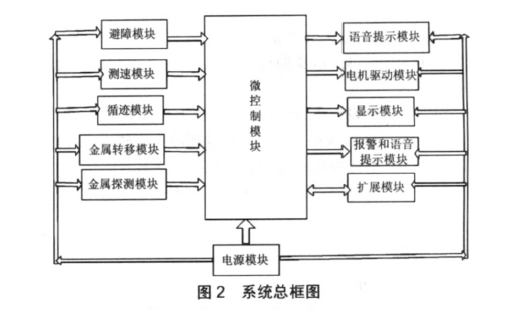
根据设计要求,本系统主要由微控制器模块、电源模块、避障模块、循迹传感器模块、直流电机及其驱动模块、金属检测模块、角度 测量模块、语音提示模块以及液晶显示模块等构成。如图2 所示。
2.1 车体方案
制作电动车,我们制定了左右两轮分别驱动,即左右轮分别用两个转速和力矩完全相同的直流电机进行驱动,车体尾部装一个万向轮。这样,当两个直流电机转向相反转速相同时就可以实现电动车的原地旋转,由此可以轻松地使小车改变运行方向。
2.2 控制模块
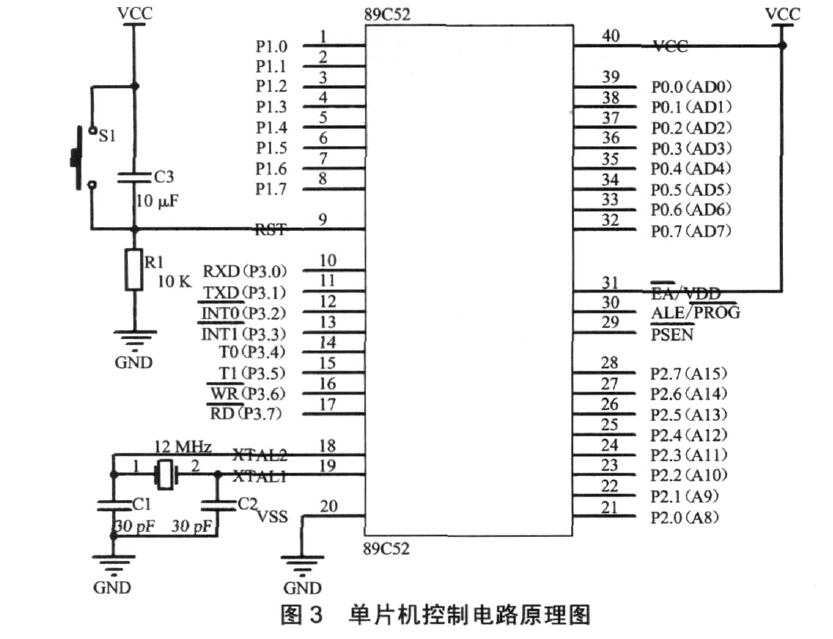
采用STC89C52 超低功耗单片机作为主控制器。STC89C52 单片机运算速度快,抗干扰能力强,支持ISP 在线编程,片内含8 k空间的可反复擦写1 000 次的Flash 只读存储器,具有256 bytes 的随机存取数据存储器(RAM),32 个I/O 口,2 个16 位可编程定时计数器。
2.3 电机模块
采用直流减速电机。直流减速电机转动力矩大,体积小,重量轻,装配简单,使用方便,小车电机内部装有减速齿轮组,不需要考虑调速功能,就可以方便地实现单片机对直流减速电机前进、后退、停止等操作。
2.4 电机驱动
因为小车的电机内部装有减速齿轮组,不需调速功能,因此采用电机驱动芯片L293D 控制减速电机,该芯片是利用TTL 电平进行控制,通过改变芯片控制端的输入电平,即可对电机进行正转、反转和停止操作,亦能满足直流减速电机的要求,用该芯片作为电机驱动具有操作方便、稳定性好等优点。
2.5 避障模块
用漫反射式光电开关即红外光漫反射式光电传感器进行避障。其原理是当前面有被检测物体时,物体将发射器发出的红外光线反射到接收器,于是光电传感器就产生了开关信号。当有光线反射回来时,输出低电平。当没有光线反射回来时,输出高电平。
2.6 循迹模块
用光敏电阻组成光敏探测器。光敏电阻的阻值可以跟随周围环境光线的变化而变化。当光线照射到白线上面时,光线发射强烈,光线照射到黑线上面时,光线发射较弱。因此光敏电阻在白色轨迹上方和黑色轨迹上方时,阻值会发生明显的变化。将阻值的变化值经过比较器就可以输出高低电平。单片机据此来判断小车是否偏离轨道,并根据反馈来的不同的电平信号,发出相应的控制操作命令来校验小车的位置,以完成小车的循迹任务。
2.7 金属传感器模块
电感式接近开关属于一种有开关量输出的位置传感器,它由LC 高频振荡器和放大处理电路组成。金属物体在接近电感式接近开关的震荡感应头时,电感式开关产生电磁场,使物体内部产生涡流。这个涡流反作用于接近开关,使接近开关振荡能力衰减,内部电路的参数发生变化,由此识别出有无金属物体接近,进而控制开关的通或断。
3 硬件系统的设计与功能实现
3.1 控制小车主线路板制作
在线路板制作设备的选择上,我们使用LPKF ProtoMat R S62电路板刻板机。LPKF 线路板雕刻机ProtoMat R S62 的精确度较高,分辨率高达0.25 μm。可快速制作各种复杂的对精度要求较高的线路板。
3.2 微控制器电路的设计与原理
微控制器电路是整个智能控制小车系统的核心控制部分,它负责对各路传感信号的采集、处理、分析及对各部分硬件电路进行调整。本设计制作的智能控制小车系统以STC89C52 单片机最小系统电路为整个系统的控制电路,通过各种传感器电路,采集各种传感器信息,以发出各种控制信号命令,来完成相应的操作,单片机控制电路原理图如图3 所示。
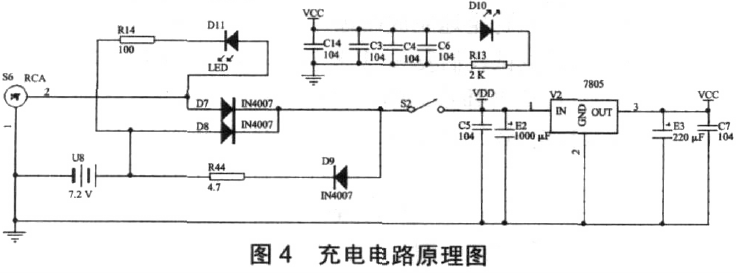
3.3 电源电路原理与设计
电源电路为系统提供基准电源,是整个系统工作稳定性之关键所在,本系统采用7.2 V 可充电动力电池组,可反复利用,动力电池组具有较强的电流驱动能力及稳定的电压输出性能。其充电电路原理图如图4 所示。
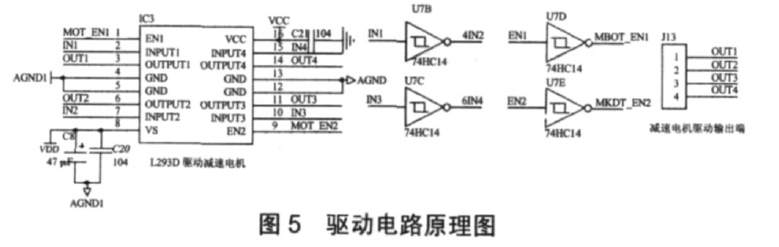
3.4 电机驱动电路的原理与设计
本设计中采用电机专用驱动芯片L293D,为单块集成电路、高电压、高电流、四通道驱动。设计用来接收DTL 或者TTL 逻辑电平,驱动感性负载(比如继电器、直流电机)和开关电源晶体管。内部包含4 通道逻辑驱动电路。其额定工作电流为1 A,最大可达1.5 A,Vss 电压最小4.5 V,最大可达36 V。
L293d 可直接对电机进行控制,无须隔离电路。通过单片机的I/O 输入改变芯片控制端的电平,即可以对电机进行正反转、停止的操作,操作非常方便,亦能满足直流减速电机的大电流要求。调试时用程序输入对应的码值,即可以实现对应的操作。其驱动电路原理图如图5 所示。
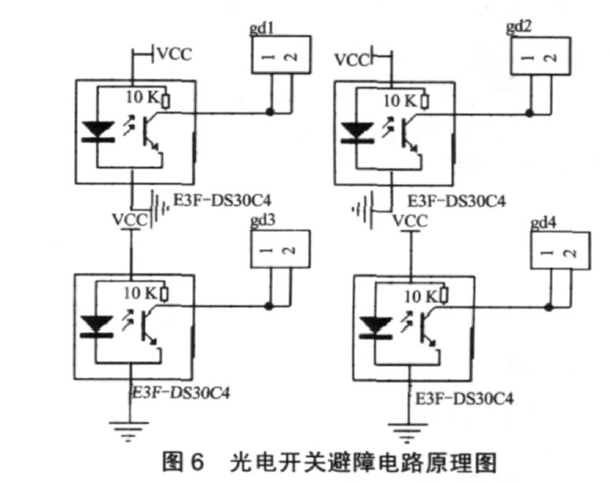
3.5 避障电路的原理与设计
用漫反射式光电开关进行避障。光电开关实际是发射端与接收端于一体的检测开关,其工作原理是根据发射端发出的光束,被物体反射,接收端据此作出判断是否有障碍物。当有光线反射回来时,输出低电平。当没有光线反射回来时,输出高电平。单片机根据接收端电平的高低作出相应控制,避免小车碰到障碍物。小车采用漫反射式传感器进行避障的电路原理图如图6 所示。
3.6 光电开关的安装
在避障传感器的设计中,我们在车体底盘的前端装有4 个传感器,以起避障的作用。4 个传感器的安装位置与安装方法相一致。
3.7 循迹电路的原理与设计
采用RPR220 型光电管完成系统循迹任务,循迹电路是小车沿着场地的黑色弧形引导轨迹BC 进行前进和位置校正,且小车不能偏离该轨迹。传感器的数据线输出信号为开关量,可直接与单片机的I/O 引脚相连接,硬件电路实现比较简单。
在循迹检测传感器设计中,我们在车体底盘的前端装有2 个传感器,用来检测黑色弧形轨迹,起到循迹前进的作用。
3.8 金属检测电路的原理与设计
金属传感器性能的好坏对于该系统的功能是否能实现起着十分重要的作用。我们选用的是LJ12A3-4-Z/BX 型号的电感式接近开关进行金属检测工作,其电路原理如图7 所示,由于其数据输出端通过5.1K 上拉电阻,输出的是TTL 电平,输出信号为开关量,可直接与单片机的I/O 引脚相连接,硬件电路简单,容易操作。

3.9 铁片转移电路原理与设计
铁片转移电路主要运用线圈通电产生磁场的原理,借助其所产生的磁场,把金属传感器检测到的铁片按相关要求转移到指定位置,本设计电路中是将线圈的输入端直接与单片机的I/O 相连接,通过改变单片机引脚的高低电平即可以改变线圈磁场。
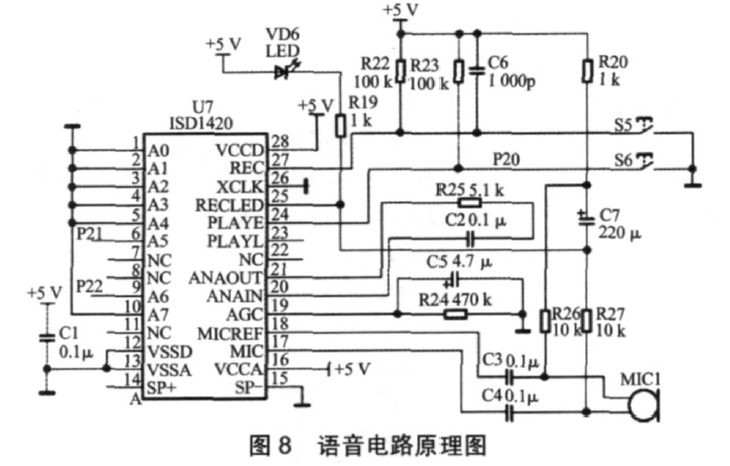
3.10 语音提示电路的原理与设计
本设计中的智能救援小车的语音提示系统由IDS1420 录放音模块和功率放大电路组成。语音提示电路主要用来提示救援小车的工作状态。IDS1420 语音电路的原理图如图8 所示。
3.11 系统其他功能的扩展
(1)通过无线遥控电路实现小车的无线控制和操作。(2)通过编码盘测量小车速度和路程功能。(3)采用ADC0832 组成的电压测量电路,并通过液晶显示控制小车系统电池组的电压。以5.5 V为参考电压,低于5.5 V 报警提示充电。
4 主程序流程图
主程序流程图如图9 所示。

5 系统功能测试
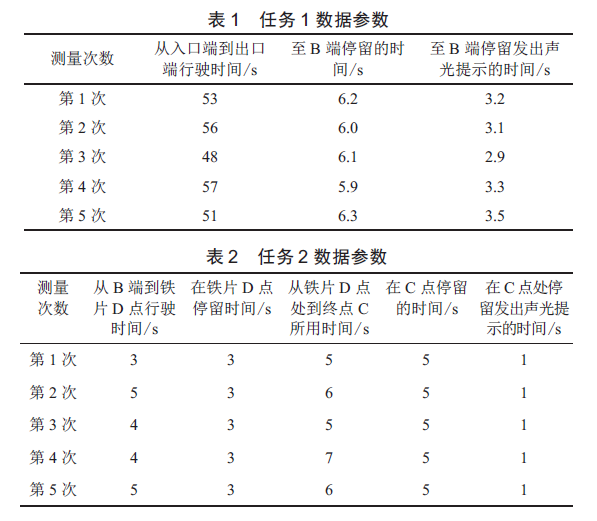
(1)首先把小车放在场地的入口处,按照规定的要求,智能控制小车从A 门进入自动选择路径从B 门出来。在行驶过程中,控制小车可以自动选择路径行走,其行走路线如图1 所示。智能控制小车从A 门进入后开始计时,并通过液晶显示器来显示控制小车系统所消耗的时间,再从B 门出来。在行进过程中,控制小车可以自动避开墙壁,找到通路,可以在3 min 之内到达B 门,在B 门处,小车检测到黑色标志,停止运行,同时发出声光,提示任务1 测试完毕。
(2)控制小车从B 门外,通过循迹黑色弧形引导线BC 前进(引导轨迹为2 cm 宽),在循迹黑色弧形引导线途中,通过接近开关电路检测到铁片D 时停车3 s(注意:铁片D 放置在轨迹BC 前1/2 段上的任意位置),并由语音电路发出语音提示,由LED 发光电路发光提示。单片机通过金属传感器电路采集到金属信息时,相应的磁感应电路接通,并产生磁场,利用线圈通电时可产生磁场的原理捡起铁片,捡起铁片之后金属传感器的检测信号不再发生变化,控制小车继续沿黑色引导轨迹前进。当控制小车到达黑色弧形引导轨迹线的终点C 之后,RPR220 型光电管电路通知单片机控制小车已完成本次控制任务,单片机通过控制相应的电机驱动电路停止电机的运行,改变相应的磁感应电路的电平状态放下铁片D,液晶显示电路分别显示走过BD、DC 段轨迹所消耗的时间。同时在此过程中,单片机控制语音电路发出语音提示,指示控制小车的控制任务结束。
智能控制小车系统的功能参数如表1、表2 所示。
6 结语
测试表明,小车能够较好地完成本文所要求的任务。同时本智能控制小车的特色是:用漫反射式传感器进行避障,灵敏度高,RPR220 型光电管能稳定地完成循迹,控制小车应用了电感式接近开关检测铁片,经测试我们发现,其检测金属准确,灵敏度较高,液晶显示效果良好,语音播报清晰,智能控制小车系统运行正常,各模块电路参数稳定,较好地完成了既定任务。